世博app官方入口(中国)官方网站-IOS/Android通用版/手机版
世博app官方入口(中国)官方网站-IOS/Android通用版/手机版

无图和端到端大模子的哄骗,是智能驾驶放工场要首先卷的功能和模式。先交卷的是华为,照旧准备7月交卷的是理想,前两位之后,小鹏却迟迟还莫得交卷的意旨真谛。在理想7月份准备全量推送无图NOA功能的同期,小鹏初始推送XNGP 5.2.0的版块。
小鹏的XNGP 5.2.0这个版块最中枢的升级,是提供了端到端大模子的上车哄骗,主如果优化了大部分的城区NOA功能,这其中包括的功能有无图过环岛、掉头体验升级、小径天真穿行等。
举座来说,推送更新之后,升迁和变化细目是有的。但此次推送的5.2.0版块毕竟如故比较早期的版块,智能驾驶层面的问题是存在的,包括了逻辑和决策上的子虚,也包括了无图端到端带来的负面影响。
激进的战略,有一定危境性

小鹏的XNGP 5.2.0版块的底层逻辑,是加了一套端到端的AI大模子。主要的变化是具备深度学习的功能,这其实是意味着这套系统需要很大的数据量来学习,而况握住优化智能驾驶功能。简言之,表面上越用越好用等于。
中枢升级是XNet 2.0版块。若何意会这个升级,带入特斯拉FSD智能驾驶系统例如,不管是华为、理想如故小鹏,他们的智能驾驶功能下一步想要达到的阶段,是像特斯拉相同的One Model时势,也等于一个模子来完成统共的感知、预判和履行。
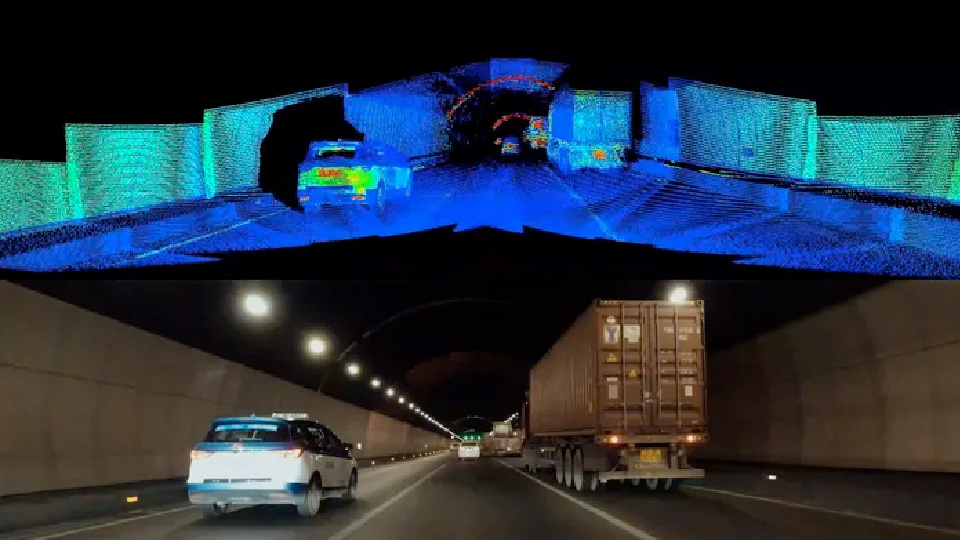
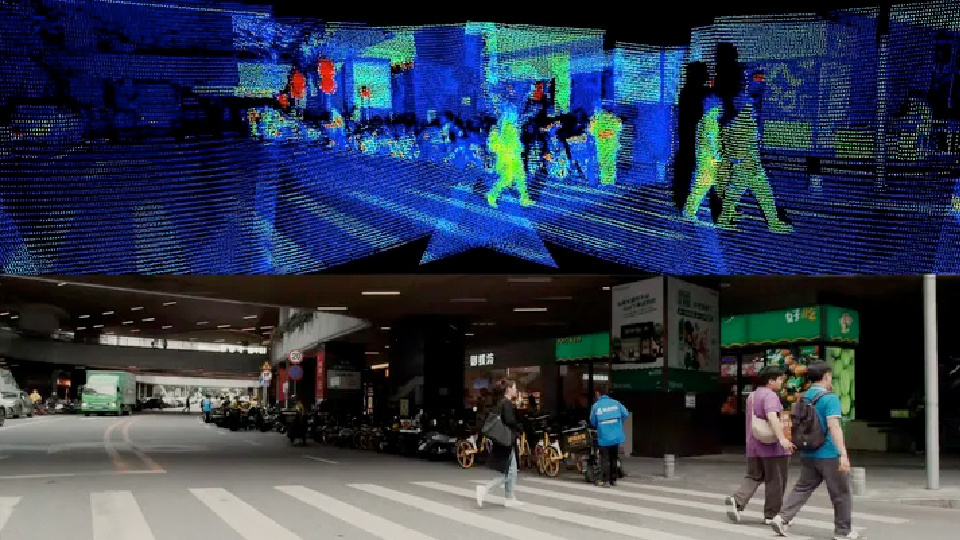
但由于咫尺算法和数据量不够,咫尺只然则多网合一的处分模式,小鹏的XNet 2.0作念的是三网合一的模式,动态+静态BEV+占据收罗。静态BEV只精良识别说念路环境的静态元素、动态BEV精良说念路环境中的动态方针(车、行东说念主等能动的物体);占据收罗,把数据作念成3D模子,是系统绕行和避障才智的基础。
靠三个收罗来竣事一套系统的感知、规控以及履行,是以在一定层面上,三合一的收罗模式是会加多不同模块之间的交互复杂性还有潜在的数据温和可能性。比拟One Model模式,系统厚实性和可靠性就不那么好。
那么,当今咱们战争到的5.2.0版块,弥散好用吗?
5.2.0版照旧推送了一个星期傍边,在使用这套智能驾驶之后的感受,基本的城区NOA功能皆不错竣事,但是,要说细节上很拟东说念主也并非是沿路工况下皆能竣事。

先说不及的地方,通行逻辑层面。
在开启城区NOA功能之后,在城市说念路中工况下,举座驾驶作风是偏向保守的,比如车辆在路口右转弯的时分统共这个词战略依旧是聘请恭候,莫得聘请绕行的操作;本车后方的车辆,借说念通过路口后,从左侧杰出了本车后完成的右转弯。
而在这个工况下,咱们的测试车,只可聘请恭候,这并不算是一个合理的通行逻辑,或者说在小鹏咫尺的查验素材当中,红绿灯路口聘请恭候是最合理的决策。
延缓战略、旅途预计上的问题。

乡间小径上的一个驾驶工况,双向单车说念,在前线有交叉路口而况有车辆左转弯汇入对向车说念的时分,小鹏XNGP 5.2.0的智能驾驶功能并莫得主动延缓,而是保执连续40-50km/h傍边的速率行驶,自后被东说念主为剿袭的打了一下场所。
这个场景下,透露了两个问题:
看车机主界面上,是识别到了对向车汇入的信息,是识别出来了的,但莫得作念出延缓,那很有一种可能是延缓战略是偏向重刹,而非是逐渐刹车减慢;
既然感知到了,但莫得作念出绕行或者侧方针操作,可能是对对向车的行驶轨迹的预计出现了一定的偏差,不然不会出现东说念主为剿袭逃匿的工况。
是以,在感知层面照旧发现了对向车的时分,依旧聘请加快通过,这样看在某些工况下的通行逻辑上也存在一定问题。
之后,是相对复杂的路口主动左迁这事。

有红绿灯的大十字街头,说念路标记明晰,主动左迁到LCC功能,具体左迁的原因不解;过后分析,可能是因为通行路口的红绿灯交错需要驾驶员证实、或者是因为通行道路并不是和所在道路对称(有一定错位,而况通行路口距离较长)需要驾驶员证实。
概况也能佐证这是真无图的决策,但,这种相对来说没那么复杂、说念路象征明晰的工况着落级LCC如实不是稀零能意会的事,因为这个工况下并不难处分。相对之下,理想AD MAX 3.0的测试版偶尔也会有从城区NOA功能左迁的时分,但是出当今环岛这种工况笼罩不好的时分会有。像小鹏XNGP 5.2.0通衢口的左迁操作,至少在测试版上没际遇过。
激光雷达皆一般,纯视觉咋办?
试过小鹏XNGP 5.2.0版块之后,没能达到我所期待的那种好用经由,概况是前期查验的数据不够,概况是因为这是前期的版块,需要调动的东西还有太多。但,其实这应该亦然比较接近最终推送的版块了,至少在功能的完成度上来看。
同期透露的问题,也很清亮。
可能三网合一带来的缺陷等于反应速率慢,以致于在感知到了对向车的汇入,并莫得作念出合理的延缓、侧目等操作,至少在被剿袭前莫得作念出任何反应。要知说念这套功能背后的感知硬件,是一颗激光雷达+双Orin X芯片作念的背书。

感知硬件和芯片硬件挑不出纰谬的时分,由于此次的更新又是端到端智能驾驶,那么只可从软件上找问题。因为端到端是一个黑盒模子,是以出现问题的时分基本无法追忆原因之后进行调试,那么小鹏XNGP 5.2.0咫尺所出现的不及,能施展得通的原因,等于数据不够用。
其实小鹏此次XNGP 5.2.0的推送,挺胆怯的,数据量不够的前提下就拿出来用了(可能是看华为、理想皆交卷了?)。施展起来,等于端到端智能驾驶的需求是十足丰富的高质料数据进行查验,而且对数据的各种性、丰富性有高条件(主如果对查验模子起到匡助,什么是对的、什么是错的),如果查验数据不及或质料不高,模子的性能可能会受到截至。
那,在智能驾驶功能际遇莫得查验过的工况下,会出现若何的情况?只然则左迁LCC,让驾驶员证实而况剿袭驾驶,因为端到端大模子里没学过或者查验过,是以只可东说念主类驾驶员来操作(如故东说念主车共驾)。
来推一波小鹏M03的智驾。
如果小鹏M03将会配备XNGP的话,纯视觉道路,感知修复大砍感知才智弱化,同期芯片算力也降。这套确立,基本上照旧不错拔除念念考和深层感知了,像路面的坑洼、轻细物体的识别等,不太容易作念出来,纯视觉+低算力芯片对大模子的依赖经由更高。

从此次XNGP 5.2.0的推送,基本能看出小鹏M03智能驾驶的上限可能性,如果有城区NOA功能,短期内(至少1年)不会有好用的体验,而且裁减了的芯片算力能否在复杂工况下凯旋履行操作,亦然个未知数。
三网合一的模式应该还会连续用shibo体育游戏app平台,纯视觉的动态BEV、静态BEV和占用收罗的准确性,细目会左迁,尤其是在高速动态下的环境感知,挑战更大。若何匹配端到端的模子数据,达到好用的经由其实挺难的,而且如故三网合一(相对来说有高延长和滞后性的问题)。挑战很大,作念好不太容易。